Модуль
GY-521 предназначен для определения расположения и перемещения объекта в пространстве с помощью 3-осевого гироскопа и 3-х осевого акселерометра. Так же на борту модуля присутствует датчик температуры. Данный модуль может использоваться для проектирования квадрокоптеров, стабилизатора для камеры или других проектов, выполненных на платформе Arduino.
Гироскоп модуля измеряет угловое ускорение тела по 3 осям (X, Y, Z), а акселерометр вычисляет ускорение тела вдоль одного направления. Для определения ускорения, акселерометр использует пьезоэлектрический эффект. В состоянии покоя модуль постоянно производит калибровку датчика. Так же датчик может определять и регистрировать динамические параметры при движении.
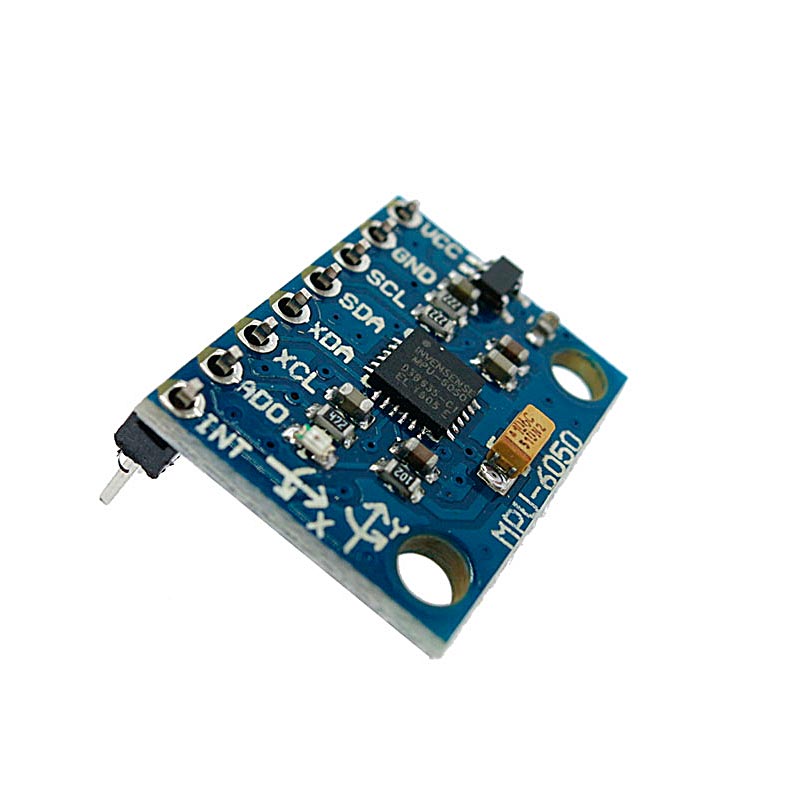
Плата модуля спроектирована на базе микросхемы
MPU-6050 американской компанией InvenSense, которая состоит из цифрового процессора для обработки сигналов движения DMP (Digital Motion Processor). С помощью процессора модуль может сам делать расчеты и обрабатывать информацию от других внешних датчиков. Данные микросхемы содержатся в кольцевом буфере FIFO. Размер хранилища буфера FIFO 1024 байт.
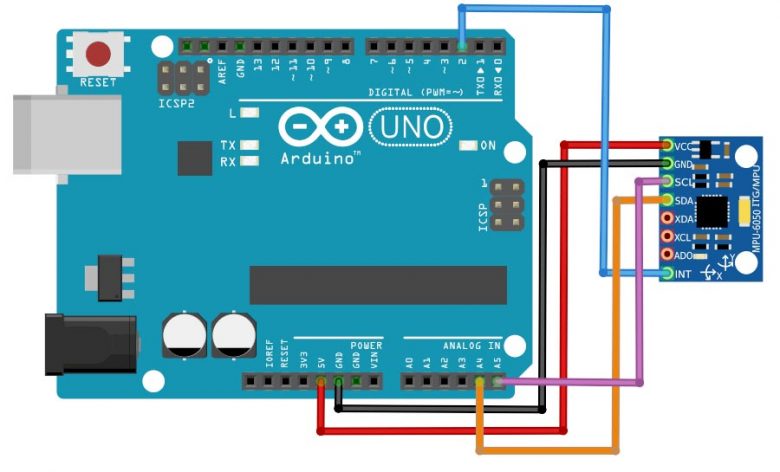
Подключается модуль к Arduino или другим микропроцессорным устройствам с помощью I2C интерфейса. Подключается I2C через выводы
SCL (тактовые импульсы) и
SDA (данные датчика). Для обеспечения питания платы используется контакты
VCC и
GND.
Напряжение может подаваться от внешнего источника питания или от платы Arduino. Кроме того, модуль
GY-521 включает понижающий линейный стабилизатор для питания от 5В. Размещенный светодиод на плате, загорается красным цветом при подаче напряжения на нее.
Для работы с модулем в среде Arduino IDE используется библиотека
WIRE. Так же есть библиотека
I2Cdevlib для доступа к
MPU-6050.






 MPU-6050 скачать PDF
MPU-6050 скачать PDF